1 引言
无人机载监测测向设备是近年来新兴的无线电监测测向设备,使用无人机载监测测向系统实现对干扰信号的空中监测、测向,避免障碍物的影响,可有效提高干扰源定位准确度。
2 无人机载监测测向系统概述
2.1 系统组成和功能
(1)飞行平台。飞行平台最好选择正规厂商出产的六旋翼飞行平台作为空中无人机载监测测向系统的飞行平台。
(2)飞控系统。飞控部分由两级控制组成:下层是目前比较先进的A3飞控系统,上层是自动飞行驾驶系统。自动飞行驾驶系统接受来自地面站的飞行指令,控制下层的A3飞控系统进行飞行姿态调控,协同执行飞行任务。
(3)数传系统。数传系统是空中与地面互联的桥梁,负责上传监测或飞行命令下传监测或飞行数据,一般采用数据收发协议802.11。
(4)地面系统。通信单元含信号收发天线,一台平板电脑作为控制、储存平台,应具有良好的人机交互界面。地面站通过发送飞行、监测指令来控制飞行平台执行任务,同时接受飞行平台下传的各类飞行与监测数据,可用于显示、存储与回放。
(5)监测设备。空中无线电监测测向系统搭载的无线电信号监测与测向系统,应包括监测接收机与所覆盖频段的多种监测与测向天线,尽量选择轻便且性能优良的监测接收机。
2.2 飞行控制
飞行控制是空中无线电监测测向系统的设计重点。可以自动飞行,也可以手动接管,保证飞行安全和操控灵活性。
(1)飞控系统。应配置遥控接收机与遥控器,且模式切换在遥控器上进行,功能的优先级高于电脑自动控制,以便于地面人员可以随时切换到遥控模式。在自动飞行的模式下,保留手动遥控的灵活性;在紧急情况下可以手动接管控制权,保证飞行安全。
(2)自动控制。自动飞行控制属于默认飞行模式,操作人员只需要设置当前信号监测测向的悬停高度即可,余下的问题由电脑自动完成。
(3)手动控制。开启手动操控模式,系统立即回被遥控器接管,所有飞行动作都将由遥控器发出,电脑控制无效。
2.3 数据传输
(1)自动模式。一般无人机上配置的是高增益板式定向天线,地面站使用的是圆极化定向天线。地空天线相向发射,保证数据传输的可靠性。在自动模式下,监测数据与飞行控制命令发送协议一般采用802.11ngb,即常见的5.8G Wi-Fi。
(2)遥控模式。在遥控模式下,仅下传监测与飞行数据,遥控器在2.4GHz以跳频方式上传遥控指令。收发天线均为全向天线,使遥控命令具有很强的抗干扰能力和较大的遥控范围。
2.4 电磁兼容性
必须对拟作为空中平台的无人机进行彻底的电磁兼容改造,系统的平均噪声电平低于-100dBm。
2.5 信号监测
空中无线电监测测向系统通过地面站平板电脑实时显示空中监测数据。系统应具备标准的ITU测量、频谱测量与频段扫描功能,对数据实时存储,并能按各种条件进行统计分析。信号参数测量应包括频率测量、频差测量、频偏测量、带宽测量等,测量结果均能够被记录。中频频谱分析支持多种频谱显示宽度,应支持基本的FM、AM、LSB、USB解调。可以进行瞬时谱、平均谱和峰值谱的显示。在监测过程中,既能够实时监听,又能够完整记录,可按频段方式扫描和记录信号。支持频段扫描功能,使用接收机内置快速拼接功能扫描并显示更宽频带,频谱图自动记录并支持回放。系统界面应分为三个部分:信号监测,主要是传统的频谱扫描与测量;信号测向,显示信号示向度与地图上的方位;飞行控制,只需要高度设置。
2.6 信号测向
(1)单次测向。无人机在收到测向指令后,进行360°旋转,取得信号强度的矢量数据,经过计算,得到信号的示向度,并在平板电脑上结合电子地图显示。对多个信号,可设置成自动任务逐个测向。
(2)3D扫描。使用空中监测测向系统的比幅测向体制进行信号测向,可以做到在三维层面上展示信号强度、方向与高度的关系,微信号测向与电波传播研究提供了一种创新形式。表1给出了不同测试高度下,接收电平值的变化。

表1 飞行高度与信号强度的变化
(3)多点定位。地面站软件可以将无人机多地点升空测向的数据,在电子地图上进行交会定位,提高大范围追踪信号的效率。同时,系统软件还可以使用公众移动4G网络联网多套无人机载监测系统,同时升空联合定位干扰源。
(4)电子地图。所有悬停的测向结果和确认后的三维采集结果,其指向都会自动在电子地图上显示。
2.7 过程记录
在系统启动后,将自动对监测、测向以及全部飞行过程数据进行实时保存。
3 无人机载监测侧向系统与便携式接
收机性能对比
表2无人机载监测设备DZF-AC1与PR100性能对比。
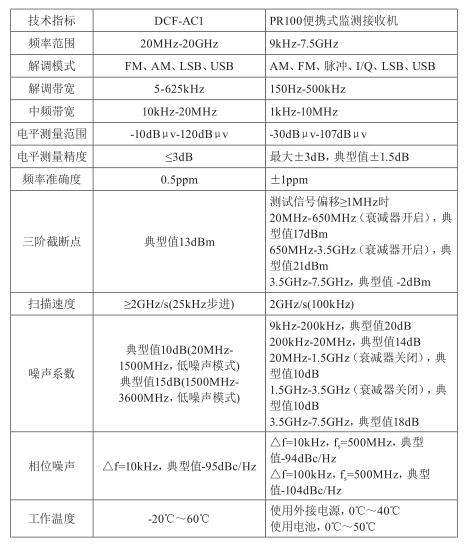
表2 性能指标对比
通过对比可以看出,DZF-AC1与PR100的大部分性能指标相近,并具有更宽的中频带宽和适应更低温度工作的能力,完全可以胜任复杂的监测测向工作。
4 查找信号源实验
4.1 演练方案
(1)演练内容。演练信号源的设置范围为国家无线电监测中心哈尔滨监测站江北园区内;各参加人员通过抽签确定查找顺序和相应频点,并领取任务卡;演练共分14组,每组2人,使用一套监测设备,每组查找2个信号源;共设4个信号源,每个信号源配置不同的打卡器;参加演练的队员找到目标信号源后,使用打卡器在任务卡对应频点下方打卡确认。
(2)评分方法。本次演练设备准备时间为3分钟,每组间隔为2分钟,查找时间为15分钟,出发后15分钟内必须携任务卡回到出发地点,否则成绩无效。由裁判统计信号源数量,确认所查信号源频率和位置正确的成绩方可有效。按规定时间内查找正确信号源数量多少排名,信号源数量相同则用时少者排名靠前。
4.2 实验结果比对
2016-2018年实际参加演练人员的成绩对比情况如表3所示。
传统的无线电干扰源监测定位方式一般需先通过两个以上的固定监测站对干扰源信号进行监测定位,确定大概区域,出动监测车逼近目标区域,进一步缩小、锁定范围,然后使用便携式监测测向设备逼近查找干扰源,最终定位干扰源的实际位置。在上述使用便携式设备逼近查找干扰源过程中,经常遇到障碍物遮挡或复杂地理环境,电波被折射或反射,上述手段的准确度和稳定性受到极大的影响,致使不能快速、有效地定位干扰源。如果使用无人机载监测测向系统构筑空中监测平台,将有效提高监测测向的准确度和稳定性,不仅能够避免障碍物引起的电波多径效应,而且能够实现快速定位干扰源,提高工作效率。
通过实验,根据场强定位法,只使用PR100监测接收机查找干扰源,查找时间和查找干扰源个数并没有明显的提高,而使用PR100和DCF-AC1无人机载监测系统,查找时间和查找干扰源个数得到了显着的提升。
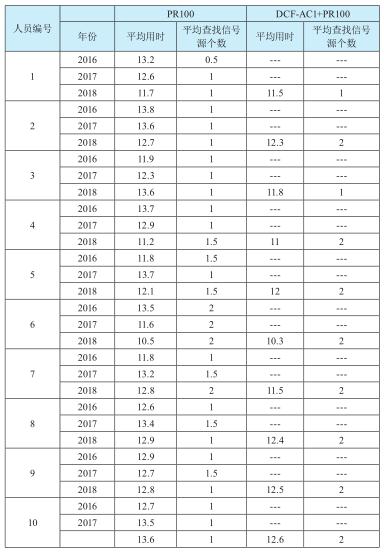
表3 演练成绩对比
5 结束语
随着无线电技术的蓬勃发展,面对日益复杂的电磁环境,既要保障通信安全,又要充分利用紧缺的频谱资源,助力经济建设,加强频谱监测,快速定位干扰源,及时消除干扰,变得越来越重要。将无人机载无线电监测测向系统应用于实际的监测技术演练中,通过对比实验得到了理想的效果。
参考文献
[1] DZF-AC1空中监测测向系统用户手册,成都点阵公司.
