1 系统总体结构设计
船岸智能航运系统是一个庞大而复杂的技术和应用体系, 依据分层、分离原则,按信息化技术功能不同,抽象、归纳出智能船舶管理系统“六横二纵”的总体框架模型。“六横”为云基础设 施层、信息采集层、数据中心层、中间件层、应用系统层和用户对象层;“二纵”为支撑“六横”的保障环境,包括标准规范体系和信息安全保障体系。
本系统的设计目标如下:能够实时采集船端A IS数据及机舱工况数据并基于海事卫星链路实时传输到岸基智能船舶管理系统;能够对船舶的定位进行全程实时监控管理;能够对船舶的轨迹进 行动态分析;能够对船队以及船队中各个船舶进行即时处理(监控处理、预警处理、险情排查、机舱工况监控处理等等);能够对船舶航行进行监管和分析等。

图1 船岸智能航运系统总体结构
2系统网络结构设计
为保证船岸智能航运平台的服务器的稳定运行,服务器区域网络设置必须是相对独立的,这可以通过设置两个不同内外接口来实现。
(1)船端采集的A IS数据及机舱工况数据基于海事卫星链路从船端通过海事卫星传输到卫星地面站,并通过卫星地面站接入Internet。
外部网络如果想接入企业内部的服务器,必须首先知道服务器的IP地址,并且只能通过IOM光纤进入。
(2)外部的用户对系统的访问,必须知晓企业的IP地址或者固定的域名。
(3)系统设置了防火墙,并对相关的端口进行了加密,这些措施可以保证企业的系统有足够的安全性。
(4)企业内部员工对系统的访问可以通过内网直接进行。
系统网络架构图如图2所示:

图2 系统网络架构图
3系统软件层次结构设计
本系统采用B/S结构,也即是我们常说的浏览器-服务器模式,其英文原语包括外部模式、逻辑模式、内部模式三种。船岸基智能航运系统的软件层次结构如图3所示:
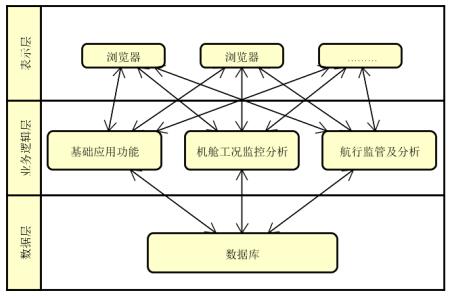
图3 船岸智能航运系统软件结构图
4系统功能结构
在船端,主机温压传感器等基于CAN总线协议汇聚于船端监控仪表台,本系统通过船载终端基于485协议与监控仪表台通讯,实现船舶A IS数据及船舶工况数据的接入与采集,并通过海事卫星链路实时向岸基回传。其功能结构如图4所示。
通过船载终端,实现船舶工况数据与A IS数据的采集,将船载终端接入船端网络环境,判别网络的通讯链路及连接状态并基于TCP协议实时向岸基回传数据。其功能主要包含如下几个方面:
(1)数据接入:通过连接船舶A IS设备引航员接口(设备空闲输出接口)及船舶机舱工况监控仪表台数据输出接口(包括设备报警及设备运行状态),基于RS485协议实现数据接入。
(2)在设备连接的海事卫星网络可用的情况下,数据基于TC P协议向岸基实时回传数据。在数据回传时使用LibZ实现数据压缩。
船岸基智能航运系统的功能模块主要有基础应用功能、机舱工况监控分析和航行监管分析三个方面组成,功能结构如图5所示。
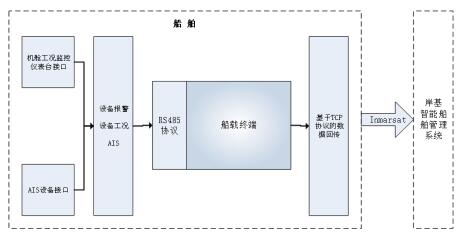
图4 船端数据采集功能结构图
5结束语
本文从系统开发的角度,从系统总体架构、网络架构、软件架构、功能架构对船岸智能航运系统进行了分析与设计,为系统开发提供技术支撑。
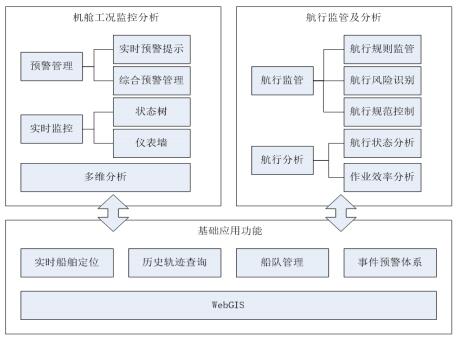
图5 船岸智能航运系统功能结构图
参考文献
[1]王玲,张彬祥.船舶通信导航技术及发展趋势[J].船舶电子工程,2016,03:17-21.
[2]王起超.基于水上位置大数据的智能服务应用模式研究[D].大连海事大学,2016.
